Tengyu Liu

“Computer science is no more about computers than astronomy is about telescopes. – Edsger Wybe Dijkstra”
I am currently a senior research scientist at the General Vision Lab of Beijing Institute of General Artifical Intelligence (BIGAI). I obtained my PhD degree in computer science from UCLA in 2021 under the supervision of Prof. Song-Chun Zhu. Before that, I received my master’s degree in computer science from UCLA and my bachelor’s degree in computer science from UIUC.
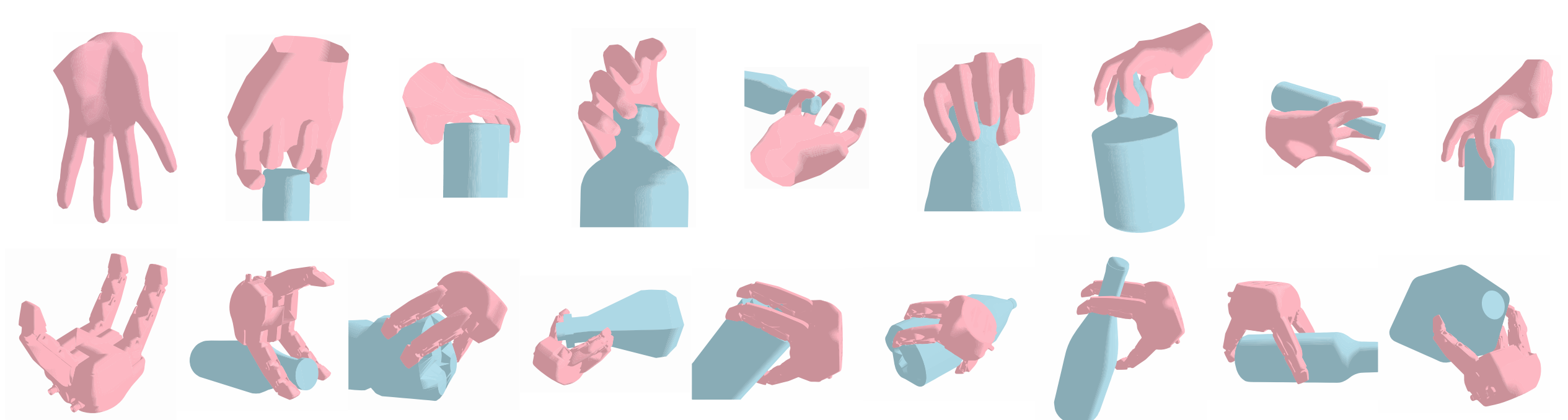
My research interest lies at the intersection between 3D computer vision, computer graphics and robotics. My long term goal is to create intelligent agents that can interact with virtual or physical environments just like us humans do. My recent works include generalizable dexterous grasping and manipulation and whole body control of humanoid and quadruped robots.
news
| Sep 6, 2024 |
I am thrilled to share that I have been promoted to Senior Researcher at BIGAI! I am profoundly grateful for the unwavering support and invaluable contributions of my talented students and esteemed colleagues. Your hard work, dedication, and innovative spirit have been instrumental.
I will continue my research in generalizable embodied intelligence and strive for more exciting breakthroughs in the field. Thank you everyone for your hard work and dedication! Here’s to the exciting journey ahead!🚀 |
|---|---|
| Jun 30, 2024 | I’m excited to share that our paper on learning agent-agnostic representations for robotic manipulation is accepted by IROS 2024 as an Oral Pitch! We will also present our RA-L work on grasping multiple objects with a single dexterous hand as an Oral Presentation. Looking forward to meeting everyone in Abu Dhabi! |
| Feb 27, 2024 | I am excited to share that 3 out of my 3 submissions in human motion generation are accepted by CVPR 2024! Congratulations to the incredible authors! See you all in Seattle! |
| Feb 24, 2024 | Our new paper Grasp Multiple Objects with One Hand has been accepted by RA-L and will be presented at IROS 2024! Congratulations to the first author Yuyang! |
| Apr 23, 2023 | I am thrilled to share that our ICRA submission DexGraspNet has been selected as an Outstanding Paper Finalist (Manipulation)! Congratulations to my co-authors and collaborators! |
selected publications


services
2024 Reviewer for ICLR, ICRA, CVPR, ICML, T-PAMI
2023 Reviewer for NeurIPS, SIGGRAPH Asia, IROS, T-RO