We introduce SceneDiffuser, a conditional generative model for 3D scene understanding. SceneDiffuser provides a unified model for solving scene-conditioned generation, optimization, and planning. In contrast to prior works, SceneDiffuser is intrinsically scene-aware, physics-based, and goal-oriented. With an iterative sampling strategy, SceneDiffuser jointly formulates the scene-aware generation, physics-based optimization, and goal-oriented planning via a diffusion-based denoising process in a fully differentiable fashion. Such a design alleviates the discrepancies among different modules and the posterior collapse of previous scene-conditioned generative models. We evaluate SceneDiffuser with various 3D scene understanding tasks, including human pose and motion generation, dexterous grasp generation, path planning for 3D navigation, and motion planning for robot arms. The results show significant improvements compared with previous models, demonstrating the tremendous potential of SceneDiffuser for the broad community of 3D scene understanding.
@article{Huang2023Diffusion,author={Huang, Siyuan and Wang, Zan and Li, Puhao and Jia, Baoxiong and Liu, Tengyu and Zhu, Yixin and Liang, Wei and Zhu, Song-Chun},title={Diffusion-based Generation, Optimization, and Planning in 3D Scenes},year={2023},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},}
CVPR
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy
In this work, we tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting. The goal is to grasp and lift up objects in high-quality and diverse ways and generalize across hundreds of categories and even the unseen. Inspired by successful pipelines used in parallel gripper grasping, we split the task into two stages: 1) grasp proposal (pose) generation and 2) goal-conditioned grasp execution. For the first stage, we propose a novel probabilistic model of grasp pose conditioned on the point cloud observation that factorizes rotation from translation and articulation. Trained on our synthesized large-scale dexterous grasp dataset, this model enables us to sample diverse and high-quality dexterous grasp poses for the object in the point cloud. For the second stage, we propose to replace the motion planning used in parallel gripper grasping with a goal-conditioned grasp policy, due to the complexity involved in dexterous grasping execution. Note that it is very challenging to learn this highly generalizable grasp policy that only takes realistic inputs without oracle states. We thus propose several important innovations, including state canonicalization, object curriculum, and teacher-student distillation. Integrating the two stages, our final pipeline becomes the first to achieve universal generalization for dexterous grasping, demonstrating an average success rate of more than 60% on thousands of object instances, which significantly out performs all baselines, meanwhile showing only a minimal generalization gap.
@article{Xu2023UniDexGrasp,author={Xu, Yinzhen and Wan, Weikang and Zhang, Jialiang and Liu, Haoran and Shan, Zikang and Shen, Hao and Wang, Ruicheng and Geng, Haoran and Weng, Yijia and Chen, Jiayi and Liu, Tengyu and Yi, Li and Wang, He},title={UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy},year={2023},booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},}
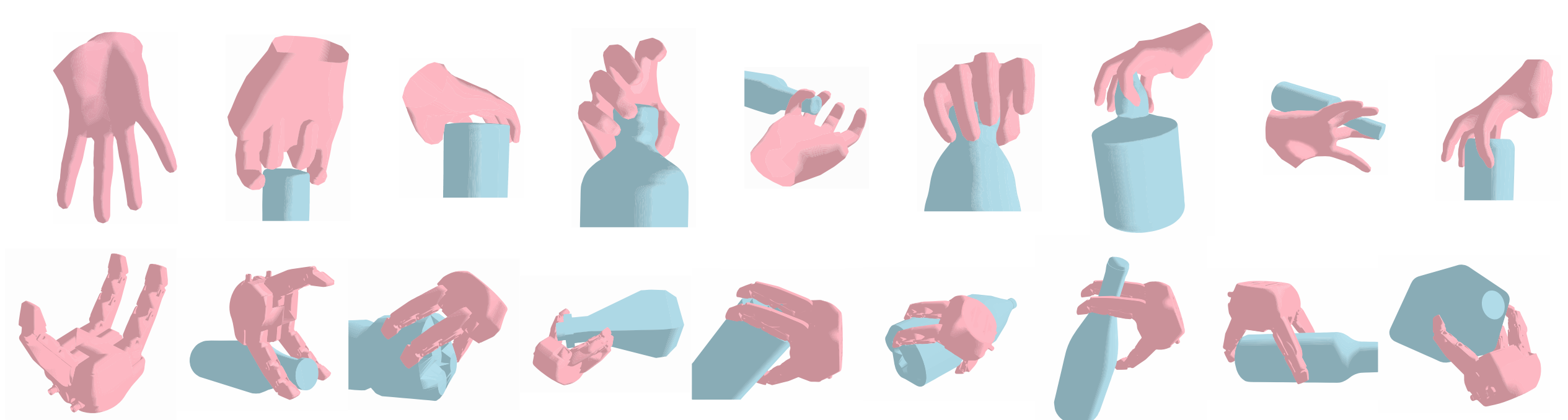
Generating dexterous grasping has been a long-standing and challenging robotic task. Despite recent progress, existing methods primarily suffer from two issues. First, most prior arts focus on a specific type of robot hand, lacking generalizable capability of handling unseen ones. Second, prior arts oftentimes fail to rapidly generate diverse grasps with a high success rate. To jointly tackle these challenges with a unified solution, we propose GenDexGrasp, a novel hand-agnostic grasping algorithm for generalizable grasping. GenDexGrasp is trained on our proposed large-scale multi-hand grasping dataset MultiDex synthesized with force closure optimization. By leveraging the contact map as a hand-agnostic intermediate representation, GenDexGrasp efficiently generates diverse and plausible grasping poses with a high success rate and can transfer among diverse multi-fingered robotic hands. Compared with previous methods, GenDexGrasp achieves a three-way trade-off among success rate, inference speed, and diversity.
@article{Li2022GenDexGrasp,title={GenDexGrasp: Generalizable Dexterous Grasping},author={Li, Puhao and Liu, Tengyu and Li, Yuyang and Geng, Yiran and Zhu, Yixin and Yang, Yaodong and Huang, Siyuan},journal={IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},year={2023},}
ICRA
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation
Object grasping using dexterous hands is a crucial yet challenging task for robotic dexterous manipulation. Compared with the field of object grasping with parallel grippers, dexterous grasping is very under-explored, partially owing to the lack of a large-scale dataset. In this work, we present a large-scale simulated dataset, DexGraspNet, for robotic dexterous grasping, along with a highly efficient synthesis method for diverse dexterous grasping synthesis. Leveraging a highly accelerated differentiable force closure estimator, we, for the first time, are able to synthesize stable and diverse grasps efficiently and robustly. We choose ShadowHand, a dexterous gripper commonly seen in robotics, and generated 1.32 million grasps for 5355 objects, covering more than 133 object categories and containing more than 200 diverse grasps for each object instance, with all grasps having been validated by the physics simulator. Compared to the previous dataset generated by GraspIt!, our dataset has not only more objects and grasps, but also higher diversity and quality. Via performing cross-dataset experiments, we show that training several algorithms of dexterous grasp synthesis on our datasets significantly outperforms training on the previous one, demonstrating the large scale and diversity of DexGraspNet. We will release the data and tools upon acceptance.
@article{Wang2022DexGraspNet,title={DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation},author={Wang, Ruicheng and Zhang, Jialiang and Chen, Jiayi and Xu, Yinzhen and Li, Puhao and Liu, Tengyu and Wang, He},journal={IEEE International Conference on Robotics and Automation (ICRA)},publisher={IEEE},year={2023},}
2022
arXiv
CHAIRS: Towards Full-Body Articulated Human-Object Interaction
Fine-grained capturing of 3D HOI boosts human activity understanding and facilitates downstream visual tasks, including action recognition, holistic scene reconstruction, and human motion synthesis. Despite its significance, existing works mostly assume that humans interact with rigid objects using only a few body parts, limiting their scope. In this paper, we address the challenging problem of f-AHOI, wherein the whole human bodies interact with articulated objects, whose parts are connected by movable joints. We present CHAIRS, a large-scale motion-captured f-AHOI dataset, consisting of 16.2 hours of versatile interactions between 46 participants and 74 articulated and rigid sittable objects. CHAIRS provides 3D meshes of both humans and articulated objects during the entire interactive process, as well as realistic and physically plausible full-body interactions. We show the value of CHAIRS with object pose estimation. By learning the geometrical relationships in HOI, we devise the very first model that leverage human pose estimation to tackle the estimation of articulated object poses and shapes during whole-body interactions. Given an image and an estimated human pose, our model first reconstructs the pose and shape of the object, then optimizes the reconstruction according to a learned interaction prior. Under both evaluation settings (e.g., with or without the knowledge of objects’ geometries/structures), our model significantly outperforms baselines. We hope CHAIRS will promote the community towards finer-grained interaction understanding. We will make the data/code publicly available.
@article{Jiang2022CHAIRS,author={Jiang, Nan and Liu, Tengyu and Cao, Zhexuan and Cui, Jieming and Chen, Yixin and Wang, He and Zhu, Yixin and Huang, Siyuan},journal={arXiv preprint},title={CHAIRS: Towards Full-Body Articulated Human-Object Interaction},year={2022},publisher={arXiv},}
NeurIPS
HUMANISE: Language-conditioned Human Motion Generation in 3D Scenes
Learning to generate diverse scene-aware and goal-oriented human motions in 3D scenes remains challenging due to the mediocre characteristics of the existing datasets on Human-Scene Interaction (HSI); they only have limited scale/quality and lack semantics. To fill in the gap, we propose a large-scale and semantic-rich synthetic HSI dataset, denoted as HUMANISE, by aligning the captured human motion sequences with various 3D indoor scenes. We automatically annotate the aligned motions with language descriptions that depict the action and the individual interacting objects in the scene; e.g., sit on the armchair near the desk. HUMANISE thus enables a new generation task, language-conditioned human motion generation in 3D scenes. The proposed task is challenging as it requires joint modeling of the 3D scene, human motion, and natural language. To tackle this task, we present a novel scene-and-language conditioned generative model that can produce 3D human motions of the desirable action interacting with the specified objects. Our experiments demonstrate that our model generates diverse and semantically consistent human motions in 3D scenes.
@article{Wang2022Humanise,title={HUMANISE: Language-conditioned Human Motion Generation in 3D Scenes},author={Wang, Zan and Chen, Yixin and Liu, Tengyu and Zhu, Yixin and Liang, Wei and Huang, Siyuan},journal={Advances in Neural Information Processing Systems (NeurIPS)},year={2022},}
2021
R-AL
Synthesizing Diverse and Physically Stable Grasps With Arbitrary Hand Structures Using Differentiable Force Closure Estimator
Existing grasp synthesis methods are either analytical or data-driven. The former one is oftentimes limited to specific application scope. The latter one depends heavily on demonstrations, thus suffers from generalization issues; e.g., models trained with human grasp data would be difficult to transfer to 3-finger grippers. To tackle these deficiencies, we formulate a fast and differentiable force closure estimation method, capable of producing diverse and physically stable grasps with arbitrary hand structures, without any training data. Although force closure has commonly served as a measure of grasp quality, it has not been widely adopted as an optimization objective for grasp synthesis primarily due to its high computational complexity; in comparison, the proposed differentiable method can test a force closure within milliseconds. In experiments, we validate the proposed method’s efficacy in 6 different settings.
@article{liu2021synthesizing,title={Synthesizing Diverse and Physically Stable Grasps With Arbitrary Hand Structures Using Differentiable Force Closure Estimator},author={Liu, Tengyu and Liu, Zeyu and Jiao, Ziyuan and Zhu, Yixin and Zhu, Song-Chun},journal={IEEE Robotics and Automation Letters},volume={7},number={1},pages={470--477},year={2021},publisher={IEEE},}
T-PAMI
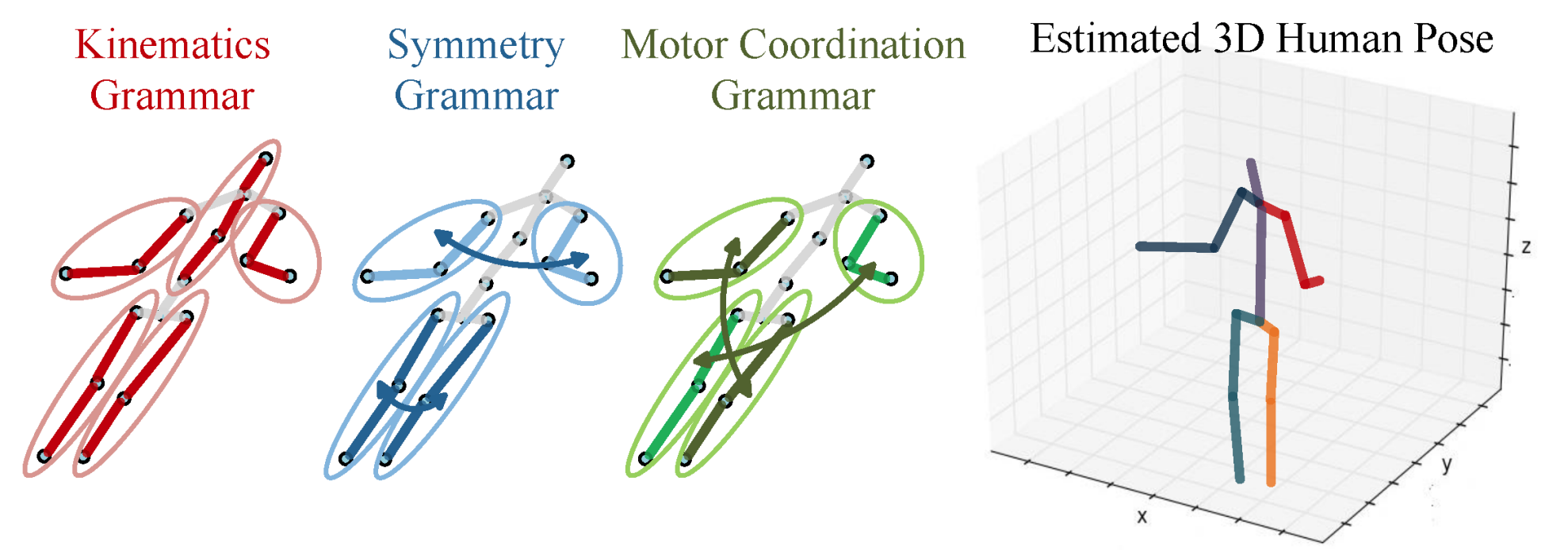
Monocular 3d pose estimation via pose grammar and data augmentation
In this paper, we propose a pose grammar to tackle the problem of 3D human pose estimation from a monocular RGB image. Our model takes estimated 2D pose as the input and learns a generalized 2D-3D mapping function to leverage into 3D pose. The proposed model consists of a base network which efficiently captures pose-aligned features and a hierarchy of Bi-directional RNNs (BRNNs) on the top to explicitly incorporate a set of knowledge regarding human body configuration (i.e., kinematics, symmetry, motor coordination). The proposed model thus enforces high-level constraints over human poses. In learning, we develop a data augmentation algorithm to further improve model robustness against appearance variations and cross-view generalization ability. We validate our method on public 3D human pose benchmarks and propose a new evaluation protocol working on cross-view setting to verify the generalization capability of different methods. We empirically observe that most state-of-the-art methods encounter difficulty under such setting while our method can well handle such challenges.
@article{xu2021monocular,title={Monocular 3d pose estimation via pose grammar and data augmentation},author={Xu, Yuanlu and Wang, Wenguan and Liu, Tengyu and Liu, Xiaobai and Xie, Jianwen and Zhu, Song-Chun},journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},year={2021},publisher={IEEE},}